
PRESS RELEASE
2021年6月2日
富士通株式会社
サントリーロジスティクス様において、
フォークリフト操作のAI判定システムにより安全運転評価業務を効率化
危険運転シーンを検知し、安全運転評価業務にかかる時間を従来比約50パーセント削減
当社は、サントリーロジスティクス株式会社(注1)(以下 サントリーロジスティクス)様と共同で、フォークリフトの安全運転評価業務を効率化するフォークリフト操作のAI判定システム(以下、本AI判定システム)を開発しました。サントリーロジスティクス様は、6 月2日よりサントリーロジスティクス様の倉庫において本AI判定システムを順次導入します。
安全運転評価業務とは、倉庫オペレーション業務における災害防止を目的に、物流倉庫内を走るフォークリフトのドライブレコーダー(以下、ドラレコ)映像を点検し、安全運転の評価および、運転者に評価内容をフィードバックする業務です。本AI判定システムは、ドラレコ映像の中からフォークリフト特有の走行状態や爪部分(注2)の動きの組み合わせから、危険な運転が疑われる動画箇所を提示することで、安全運転評価業務の効率化を実現します。
サントリーロジスティクス様では、フォークリフトによる労働災害を防ぐため、2018年よりフォークリフトにドラレコを導入し、これまで、サントリーロジスティクス様の安全推進部の従業員が年2回計500時間かけて数百名分のドラレコ映像の点検を行っていました。今回、本AI判定システムを活用することで、安全運転評価業務にかかる時間を従来比約50パーセント削減できます。また、評価における従業員毎のばらつきを抑えることで運転者への正確なフィードバックが可能となり、より安全な運転を支援します。
当社は、今後もAIなどの先端テクノロジーと業務ノウハウを活用して、食品物流業界をはじめとする企業や社会のさらなるデジタルトランスフォーメーションを牽引していきます。
背景
物流業界では、荷役作業中の労働災害のうち、多数がフォークリフトに起因するもので、フォークリフト運転者を含めた労働者の死亡事故が毎年発生しています。そこで厚生労働省は、フォークリフトの運転者などが行う荷役作業における労働災害の防止を目的として、2013年に「陸上貨物運送事業における荷役作業の安全対策ガイドライン」を策定しました。
サントリーロジスティクス様はこのガイドラインに従い、倉庫オペレーション業務における災害防止を目的にドラレコを導入し、フォークリフト操作の確認および評価業務による安全・安心な業務を推進しています。一方で、年2回数百名分のドラレコ映像点検に膨大な時間がかかるため、安全推進部の従業員による目視確認での見落としや均一な評価が課題となっていました。また、既存のドラレコ映像解析システムでは、フォークリフトの爪部分の動きなど、フォークリフトに特化した動きの検知ができないことも課題でした。
そうした状況の中、サントリーロジスティクス様はデジタル技術を活用した業務改革の一環として、安全推進部の従業員の評価業務の効率化に取り組んでおり、当社とともに富士通クラウドテクノロジーズ株式会社(注3)のAIノウハウを活用したフォークリフト操作のAI判定システムの開発を進めてきました。2020年4月より技術検証を進め、その有用性を確認できたことから、このたび、2021年6月2日よりサントリーロジスティクス様の倉庫において順次導入します。
フォークリフト操作のAI判定システムの特長
1.倉庫内を走るフォークリフト特有の危険運転シーンを切り出し、評価業務における効率性を向上
本AI判定システムは、フォークリフトを運転する上で危険運転につながる行為である「ながら操作」「静止確認不足」「一時停止確認不足」(注4)の危険運転シーンを検知することが可能です。映像の変動量の分析やディープラーニングを用いた解析を行い、フォークリフトの走行状態(走行中、旋回中、停止中)、運転者の乗車状態(乗車中か否か)、爪の昇降位置の状態(操作中、停止中)といった3つの状態の組み合わせから、「ながら操作」「静止確認不足」「一時停止確認不足」の危険運転シーンを検知します。例えば走行状態が「旋回中」かつ爪の状態が「爪操作中」である場合は、「ながら操作」の一つである「旋回ながら操作」(注5)の運転であるといったように、危険運転シーンの検知を行います。
シーンを切り出した結果、危険運転が行われているか否かの検知結果に基づき、危険運転が行われている時間帯と危険運転が行われていない時間帯との動画像データの再生速度を変えることにより、安全運転評価業務にかかる時間を従来比約50パーセント削減します。
また、従来は安全推進部の従業員の目視のみでドラレコ映像の点検を行っており、見落としや評価のばらつきが起こりうる状態でした。本AI判定システムにより、人為的なミスを削減できるほか、標準化された評価が可能となり、より安全な運転を支援します。
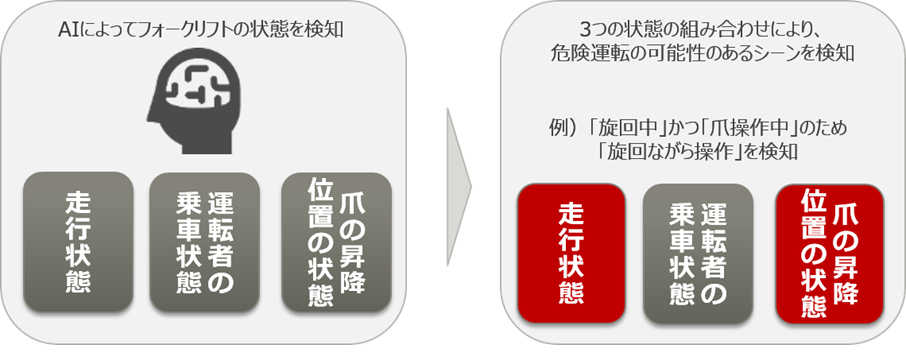 図1 危険運転検知の方法
図1 危険運転検知の方法2.危険運転シーン検知の根拠を可視化することで、評価の納得感を向上
検知した危険運転シーン(図2の①)とともに検知の根拠(図2の②)を動画上に表示し、評価者に提示します。また動画内の安全運転シーンの割合を見積もる係数をサントリーロジスティクス様独自の安全係数(図2の③)として表示します。安全係数は運転者がフォークリフトを操縦している時間に対する安全な運転をしている時間の割合で算出され、安全運転の時間が多いほど安全係数が高く表示されます。これらにより、評価者は特に注意が必要な危険運転シーンに集中して評価することができます。また、運転者はこれまで以上に適切かつ納得感の高い運転評価のフィードバックを受けられるようになります。
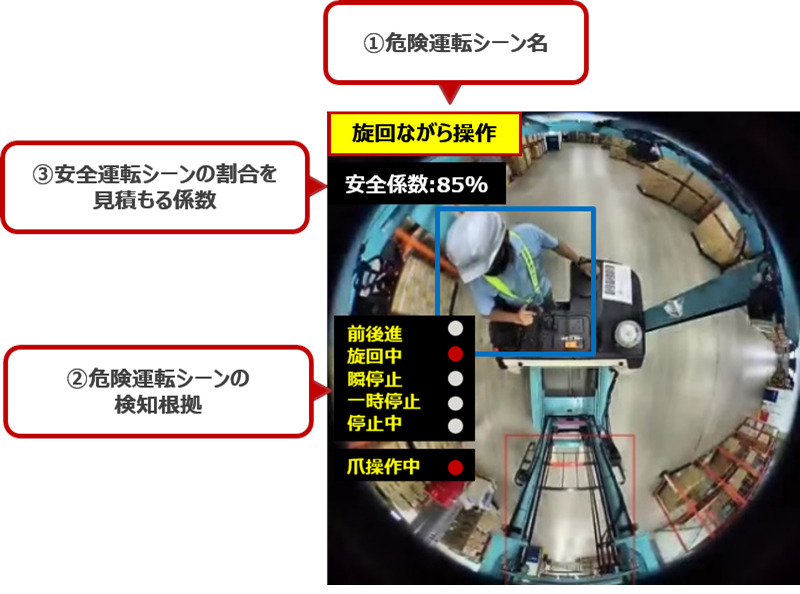 図2 動画の表示イメージ
図2 動画の表示イメージ今後について
当社は今後、サントリーロジスティクス様と共同で、リアルタイムでのアラーム通知といった機能を拡張し、フォークリフトを使う業種・業界に向けてサービス拡大を検討中です。先端テクノロジーを幅広く取り入れることで、安全推進業務のさらなる効率化・品質向上を目指します。
商標について
記載されている製品名などの固有名詞は、各社の商標または登録商標です。
注釈
-
注1サントリーロジスティクス株式会社:
本社:大阪府大阪市北区、代表取締役社長:武藤 多賀志。 -
注2爪部分:
フォークリフトで貨物を乗せるフォーク(爪)状の部分を指す。 -
注3富士通クラウドテクノロジーズ株式会社:
所在地:東京都中央区、代表取締役社長:関根 久幸。 -
注4「ながら操作」「静止確認不足」「一時停止確認不足」:
「ながら操作」とは、フォークリフトが走行したままの状態で爪(フォーク)を操作する動作を指す。「静止確認」とは、フォークリフトが爪に貨物を乗せる際に停止を行い、貨物の揺れが収まっていることを確認することを指す。「一時停止確認」は、停止線などで一時停止を確認することを指す。 -
注5「旋回ながら操作」:
フォークリフトが旋回しながら、爪を操作する動作を指す。
当社のSDGsへの貢献について
![]()
2015年に国連で採択された持続可能な開発目標(Sustainable Development Goals:SDGs)は、世界全体が2030年までに達成すべき共通の目標です。当社のパーパス(存在意義)である「イノベーションによって社会に信頼をもたらし、世界をより持続可能にしていくこと」は、SDGsへの貢献を約束するものです。
本件に関するお問い合わせ
-
富士通コンタクトライン(総合窓口)
0120-933-200(通話無料)受付時間: 9時~12時および13時~17時30分(土曜日・日曜日・祝日・富士通指定の休業日を除く)
-
Webでのお問い合わせ
入力フォームへ当社はセキュリティ保護の観点からSSL技術を使用しております。
プレスリリースに記載された製品の価格、仕様、サービス内容などは発表日現在のものです。その後予告なしに変更されることがあります。あらかじめご了承ください。