PRESS RELEASE (技術)
2014年6月10日
株式会社富士通研究所
広角カメラに対応した車線逸脱警報の技術を開発
ドライブレコーダのカメラで従来比2倍の警報性能を実現し、安全運転を支援
株式会社富士通研究所(注1)(以下、富士通研究所)は、ドライブレコーダ(注2)として車両に搭載される広角カメラに適用可能で安全運転を支援する車線逸脱警報の技術を開発しました。
近年、交通事故低減に向けて路外逸脱を抑制するための車線逸脱警報を、商用車を中心に普及が進むドライブレコーダの広角カメラを用いて実現することが望まれていました。しかし、従来の車線逸脱警報の技術は白線を遠方まで広く映せる狭角(望遠)カメラを必要としており、近方の部分的な白線しか映らない広角カメラでは車線を正しく検出できず、要求される警報性能を満たせないという課題がありました。
今回、路面の部分的な白線に対して走行のふらつきに伴う位置ずれを補正し、複数の路面画像を滑らかにつなぐことで路面全体の正しい車線形状を推定する車線認識技術を開発し、広角カメラでも狭角カメラを用いた専用機と同等以上となる95%の警報性能を持つ車線逸脱警報を実現しました。本技術により、新たに専用カメラを設置しなくても、ドライブレコーダに走行時の予防安全機能として車線逸脱警報を追加できます。
本技術の詳細は、6月11日(水曜日)からパシフィコ横浜で開催される「画像センシングシンポジウム SSII2014」にて発表します。
開発の背景
交通事故低減に向けた予防安全の一環として、車両走行中の路外逸脱を抑制するため、前方撮影カメラを用いた車線逸脱警報装置の装着法制化や導入補助金による装着促進が国内外で進んでいます。装置に求められる性能基準は白線までの距離が概ね30cm以下で警報を発するといわれており、これを満たす装置として、専用の狭角カメラを用いた車線逸脱警報装置が実用化されています。一方で、事故証跡の記録や安全教育への活用を目的として、以前より広角カメラを用いたドライブレコーダの装着が進んでおり、コスト面から車線逸脱警報用に新たなカメラを設置することなく、ドライブレコーダの広角カメラを共用して車線逸脱警報機能を実現することが望まれていました。
課題
これまでの車線逸脱警報装置では、画角30度程度の専用挟角カメラを用いて路面を遠方まで撮影することで様々な車線形状を安定的に認識して、逸脱警報に必要な性能基準を実現していました。しかし、ドライブレコーダの広角カメラは、記録用途のため映る角度範囲は130度程度と広いものの、遠方の解像度が低く自車両に近い路面の白線しか映らず、車線形状を正しく認識できないことがあり、逸脱警報の性能基準を満たせないという問題がありました。広角カメラでも車線逸脱警報の性能基準を満足するためには以下の課題があります。
- 破線カーブ路での白線形状の誤認
破線カーブ路を狭角カメラで映すと、道に沿って複数の白線破線が観測できますが(図1-ア)、広角カメラ(130度)では近方領域しか映らないため、左右1対の破線しか観測できません(図1-イ)。破線は長さが8m程度と短いため、それだけではカーブ路の曲がり具合(カーブ曲率)を判別できず、従来方式では、カーブ路を直線路と誤認して白線までの距離に誤りを生じます。
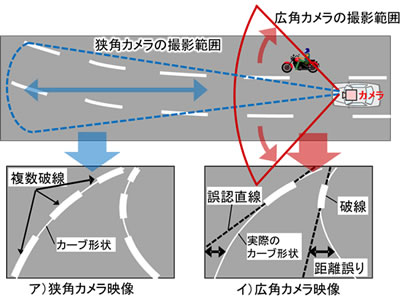
図1 広角カメラ映像での破線カーブ路での車線形状推定誤り - 減速目的の多重線路での誤認
曲率の大きなカーブ路では、減速を促すために内側に短破線の補助線が敷設された多重線路となることがあります。多重線路を広角カメラで撮影すると、広角ゆえの解像度不足から近接する内側補助線と実際の車線を分離できず(図2)、内側の補助線を走行線と誤認してしまい、実際の車線までの距離に誤りを生じます。
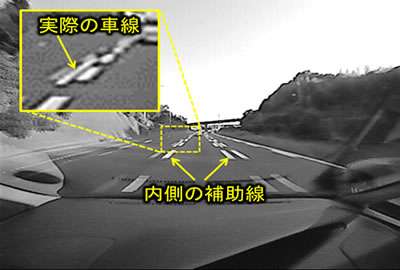
図2 広角カメラ撮影の多重線路例
開発した技術
広角カメラの解像度不足を補うために、時系列の路面映像から得られた複数の白線画像を用いて路面全体の正しい車線形状を推定する白線検出技術を開発しました。
開発した技術の特長は以下のとおりです。
- 破線カーブ路への対応
- 複数画像合成による車線形状の推定(方式1)
短時間では道路形状は変化が少ないことに着目して、例えば100ミリ秒ごとといった時系列の複数画像の破線をつなぐことで車線形状を復元します。しかし実際には、自車両の移動によって白線位置は画像ごとにずれるため、単純にはつながらない問題があります。そこで、車両の動きと車線形状を同時に推定して正しい車線形状を推定する方式を開発しました(図3)。
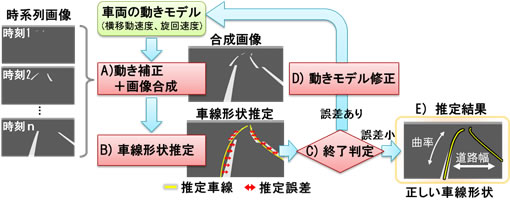
図3 自車移動補正を用いた複数時刻の白線合成による車線形状推定具体的な手順は以下となります。
- 車両の動きを横移動(等速移動)と旋回(等速旋回)でモデル化し、時系列の白線画像から動きモデルを用いて移動の影響を補正した路面合成画像を作成(図3-A)。
- 合成画像の白線から車線形状を推定(図3-B)。動きモデルが実際の動きと異なると、(図3-B)に示すような推定誤差が生じる。
- 推定誤差が十分小さくなるまで、動きモデル(横速度、旋回速度)を誤差が減少するように修正して(図3-D)、再度(図3-A)から処理を繰り返し、最終的に自車両の動きを補正した正しい車線形状を推定(図3-E)。
- 時間差によるパラメーターの推定(方式2)
車線逸脱の危険に遅れなく警報を発するには、各時刻の画像に対して車線を推定するリアルタイム性が必要です。前記の方式1はカーブ形状を含め車線を安定的に認識できますが、複数時刻の画像を用いるため処理が間欠的となり、リアルタイム性の確保が課題となります。一般に車線形状は、道路の曲がり具合(カーブ曲率)が分かっているならば、各時刻の1枚の画像からでも推定できるため、カーブ曲率だけは直近過去の車両前方の複数画像を用いて方式1によって算出しておき、残りの車線形状(道路幅、車両向きなど)は、現時刻の単一画像から算出する時間差によるパラメーターの推定方式を開発しました(図4)。カーブ曲率は短時間では変化が少ないため、時間的に近い過去画像から算出しても車線形状の推定精度はほとんど劣化しません。本方式により、各時刻でリアルタイムに車線形状を推定することが可能です。
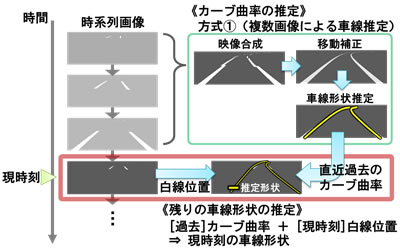
図4 時間差パラメーター推定方式
- 複数画像合成による車線形状の推定(方式1)
- 道路幅補正による多重線対応方式
多重線路で敷設される内側の補助線は、実際の車線と平行に一定距離内側に敷設されることに着目し、内側の補助線を用いて「仮の車線形状」を推定しておきます。走行に伴い実際の車線が自車両の近くに位置して大きく映る場合に、計測した補助線と車線とのずれ量を用いて、仮の道路幅を補正し、正しい車線形状を推定する方式を開発しました(図5)。
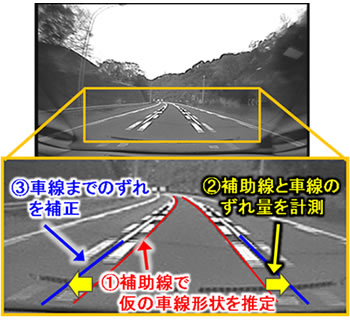
図5 道路幅補正による多重線路対応方式
効果
実路で撮影した広角カメラ映像データ(160分)による評価を行ったところ、従来方式に比べて約2倍の性能となる96%の割合で、性能基準を満足する精度(誤差30cm以下)で白線までの距離を計測できることを確認しました(図6)。
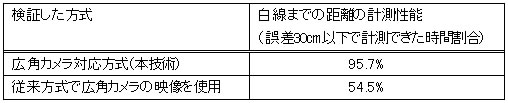
図6 白線までの距離の計測性能の評価結果
また、車線逸脱警報性能では、延べ460回の車線変更に対する評価で、95%の精度で車線逸脱を正しく警報できることを確認しました。
本技術によって、広角カメラであっても安定して車線白線を検出でき、普及が進むドライブレコーダのカメラを利用して、各種性能基準を満足する高精度な車線逸脱警報を低コストに実現できます。
今後
富士通研究所では、ドライブレコーダなどへの車線逸脱警報機能の搭載に向け、2014年度中に本技術の実用化を目指します。さらに、走行時の安全支援として運転者への警報だけでなく、ドライブレコーダで取得される走行逸脱状態による運転リスク分析への応用も視野に入れて、本技術の研究開発を進めます。
商標について
記載されている製品名などの固有名詞は、各社の商標または登録商標です。
以上
注釈
本件に関するお問い合わせ
株式会社富士通研究所
メディア処理システム研究所 メディアサービス研究部
![]() 044-754-2444(直通)
044-754-2444(直通)
![]() ms_ldw@ml.labs.fujitsu.com
ms_ldw@ml.labs.fujitsu.com
プレスリリースに記載された製品の価格、仕様、サービス内容、お問い合わせ先などは、発表日現在のものです。その後予告なしに変更されることがあります。あらかじめご了承ください。