PRESS RELEASE (技術)
2012年10月29日
株式会社富士通研究所
業界初!水平、垂直ともに140度を測距可能な3次元広角レーザーレーダーを開発
車両周辺の障害物を従来の2倍以上の広範囲に検出可能になり、高度な後方運転支援システムの提供が可能に
株式会社富士通研究所(注1)は、従来の約2倍以上の広範囲(水平・垂直とも140度)を測距可能な3次元広角レーザーレーダーを開発しました。
自動車を駐停車する際の後方運転支援システムとして、超音波センサーなどがすでに商用化されていますが、検出角度が狭いため、車両周辺の状況を広範囲に測距するには複数のセンサーが必要でした。今回、レーザーを広角に出射するための走査角度拡大レンズと、広範囲を高速に測距する高速多点レーザー走査システムの開発により、水平・垂直とも、従来の約2倍の約140度の測距を実現しました。これにより、少ないセンサー数でより広範囲の3次元測距を行えると同時に、高度な後方運転支援システムを構築することが可能となります。また単に車両周辺状況を表示する車載カメラとは異なり、ドライバーに対しては、事故が起きやすい後方発進時や苦手意識のある後方駐停車時に、対象物までの異常接近などを検知、警告するシステムを提供することが可能となるため、安全・安心な運転の実現に貢献することが期待されます。
本技術の詳細は、10月22日(月曜日)からオーストリア・ウィーンで開催された国際会議「ITSWC 2012(Intelligent Transport Systems. World Congress)」にて発表しました。
開発の背景
従来、欧米では、自動車で発進する際、後方発進することが一般的で、その際、ドライバーの不注意や見落としによる重大な人身事故が発生していました。特に、家族を巻き添えにする悲惨な事故の頻度が高く、米国では、いわゆるKT法(注2)が施行されるきっかけとなりました。また、日本では、自動車を駐停車させる際、後方から行う場合が多く、運転技術的の未熟なドライバーに対して不安を与えていました。これらのような背景は、車載バックカメラを中心にした、各種駐車支援システムが商用化されるきっかけになりました。
課題
後方発進時、車載バックカメラは、車両周辺の状況を単にドライバーに表示するのみで、ドライバーが表示用モニターを見落としている際に警告を与えることはできませんでした。また、超音波センサーなどを用いて、対象物までの距離を測定するシステムもありますが、測定可能距離が短く、精度が不十分で誤検知や過検知も多いため、ドライバーに対して十分に有効な警告を与えることができませんでした。一方、現在では測距距離が長く、測定精度(分解能)が高いレーザーレーダーが、数十メートル遠方の車両位置の計測に用いられていますが、検出角度が60度以内と狭く、車両周辺の状況を広範囲に3次元測距するには複数個のレーザーレーダーを用いる必要がありました。そのため、少ないセンサー数で、広範囲かつ高精度な測距の実現が課題となっていました。
開発した技術
今回、レーザーを広角に出射するために新規に開発した走査角度拡大レンズと、広範囲を高速に測距する高速多点レーザー走査システムにより、広範囲の測距が可能な3次元レーザーレーダーを開発しました。
開発した技術の特長は以下の通りです。
- 走査角度拡大レンズ
入射してくるレーザー光の入射角度に対して、約4倍に角度を拡大して出射する、走査角度拡大レンズを新規に開発しました(図1)。

図1 走査角度拡大レンズ - 高速多点レーザー走査システム
高速レーザー発光回路と、MEMS(Micro Electro Mechanical Systems)ミラーを用いた高速走査システムを用いることにより、水平方向140度×垂直方向140度の空間を、76,800点(320×240)というQVGA相当の精度で3次元測距可能とする、高速多点レーザー走査システムを開発しました(図2)。
システムは、大きく、投光ユニット部と受光ユニットから構成されており、投光ユニット部は、レーザー、高速レーザー発光回路、走査用ミラー、走査角度拡大レンズが組み込まれ、受光ユニットは、測定対象物からの反射光を受光する光検出器、対象物までの測距を行う距離計測回路で構成されています。
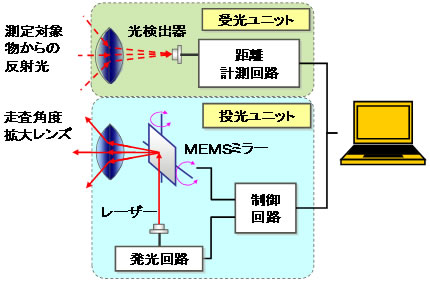
図2 高速多点レーザー走査システム
効果
本技術により、後方を含む広範囲な車両周辺の3次元測距をより少ないセンサー数で実現することが可能となります。さらに、カメラ画像にレーザーレーダーの測距情報を重畳して表示するような、高度な機能を有する後方運転支援システムの構築を可能にします。また、ドライバーに対しては、事故が起きやすい後方発進時や苦手意識のある後方駐停車時に、対象物までの異常接近などを検知、警告するシステムを提供することが可能となるため、安全・安心な運転の実現に貢献することが期待されます。
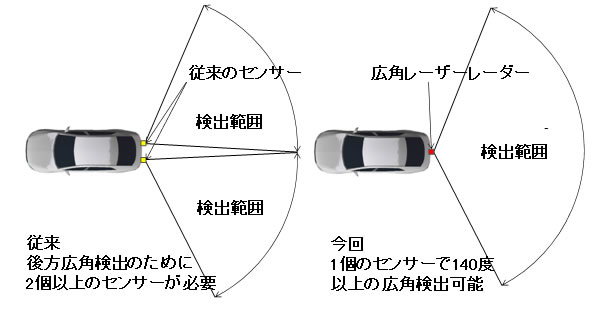
図3 従来のセンサーと広角レーザーレーダーの比較
今後
富士通研究所では、本広角レーザーレーダー技術の、さらなる広角化、小型化を進める予定です。また、カメラ画像との融合表示技術も合わせて開発することにより、ドライバーにとって、より運転のしやすい車両周辺監視や後方駐停車・発進時支援システムの実現を目指します。さらに、本レーザーレーダーは、人物の存在や、人が立っているか座っているかなどの状態の検出も可能なことから、車載用途だけではなく、見守り、監視などのセンサーへの応用・展開も進めていく予定です。
商標について
記載されている製品名などの固有名詞は、各社の商標または登録商標です。
以上
注釈
本件に関するお問い合わせ
株式会社富士通研究所
メディア処理システム研究所
![]() 078-934-8277(直通)
078-934-8277(直通)
![]() swrlr@ml.labs.fujitsu.com
swrlr@ml.labs.fujitsu.com
プレスリリースに記載された製品の価格、仕様、サービス内容、お問い合わせ先などは、発表日現在のものです。その後予告なしに変更されることがあります。あらかじめご了承ください。