
PRESS RELEASE (技術)
2007-0191
2007年9月12日
富士通株式会社
株式会社富士通研究所
次世代ロボット向け3次元画像認識用LSIを開発
~高度な視覚機能を専用LSIで実現~
今回の成果は、9月13日から15日まで千葉工業大学で開催される「第25回日本ロボット学会学術講演会」で発表します。
背景
 図1:開発した3次元画像認識LSI |
人と共存して人を補助する次世代ロボットには、家庭内などの生活空間で、自ら認識、判断して作業を遂行する自律機能が必要です。そのためには、人間と同じように、周囲の物体の形や動きをリアルタイムに3次元で認識する機能が不可欠です。ロボットが3次元で環境を認識する方法としては、レーザーを使ったレンジファインダーなども用いられていますが、富士通と富士通研究所では重量や安全性の点から、人間の目と同じように左右2つのカメラ画像を使ったステレオ法(注3)に注力しています。
課題
ステレオ法により、変化の激しい実際の生活空間を認識するためには、膨大な画像データをリアルタイムで処理する性能が必要があり、従来は高性能な計算機が用いられていました。家庭内でバッテリーで動作する実用ロボットに本機能を搭載するには、低消費電力の専用プロセッサの開発が課題になっています。
技術の概要
富士通研究所がこれまで開発してきた「動的3次元環境認識」の技術を応用し、次世代ロボットに要求される3次元計測、動き計測、パターン認識などの視覚認識機能に共通する基本画像処理を専用ハードウェア化し、膨大な画像データ処理をステレオ法によりリアルタイムかつ低消費電力で実現する専用LSIを開発しました。
- 256個の並列演算回路により、空間フィルター(注4)など画像データの積和演算の高速処理を実現しました。
- 画像の濃淡パターンの特徴量を計算する専用回路の搭載により、エッジやコーナー(注5)などの約2,000点の特徴点を毎秒30フレームと高速に抽出(注6)可能です。
- 2つのパターンの一致度を高速に計算する新方式の並列処理回路を搭載し、当社従来機種比5倍以上のパターンマッチング性能(注7)を実現しました。また、画素より細かい精度の分解能での詳細なマッチングを行う機能、距離や角度によって見え方が異なるパターンの間でパターンの拡大・縮小・回転を伴いマッチングを行う機能も実現しました。
- 周波数200メガヘルツの動作時の消費電力は約2.7ワットと当社従来機種に比べて30パーセント以上の省電力化を実現しました。
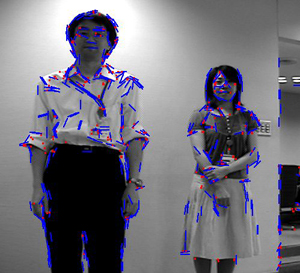
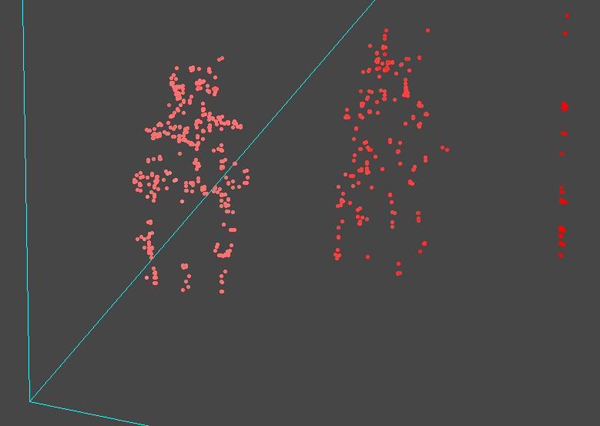
図2: ステレオ法による3次元画像認識 (上:左右の視覚、下:得られた3次元計測結果)
|
|

|
効果
小型・低消費電力の専用プロセッサの開発により、リアルタイムに3次元画像処理ができるLSIを家庭用など比較的小型のロボットにも組み込みが可能になりました。
今後
今回開発したLSIを搭載した小型の画像処理モジュールを開発し、次世代ロボットの視覚機能に必要な各種認識ソフトウェアの充実を図るとともに、次世代ロボット用の共通コンポーネントとしての普及を推進します。
今回開発したLSIの一部は、富士通が独立行政法人 新エネルギー・産業技術総合開発機構(NEDO)の『21 世紀ロボットチャレンジプログラム』「次世代ロボット共通基盤開発プロジェクト」(平成17 年~平成19 年度)の受託事業として開発したものです。同プロジェクトでは、平成19年度中に、本LSIを搭載したモジュールをロボットに搭載し、その機能や性能を実証する予定です。
以上
注釈
- 注1 株式会社富士通研究所:
- 代表取締役社長 村野和雄、本社 神奈川県川崎市。
- 注2 次世代ロボット:
- 工場で製品の組み立てなどに使われる産業用ロボットと異なり、案内、搬送、巡回監視、清掃、福祉、生活支援、アミューズメントなどのさまざまな場面で、人間の代わりとして、または、人間と協調して働くことのできるロボット。
- 注3 ステレオ法:
- 立体物の形状や3次元位置の計測を画像から行う「3次元画像計測」の手法のひとつで、カメラなどを左右に2台並べて三角測量の原理で計測を行う手法。ステレオ法では、まず、画面の中で明るさの変化の大きい領域などの特徴のある領域(特徴点)を抽出し、次に、左右2つのカメラの画面の間で、これらの特徴点の対応関係を求めることで、3次元の情報を計算する。ステレオ法では、画面の中から特徴点を抽出する処理、左右の画面間で特徴点の対応を求める処理に多くの処理量が必要とされる。
- 注4 空間フィルター:
- 画像データのノイズや歪みを取り除いたり、明るさの変化のある部分を抽出・強調したりなど、計算機での認識を容易に行えるようにするために利用する代表的な画像処理手法。注目している画素の明るさと、その隣(上下左右など)の画素の明るさに重み付けをして足し合わせたものを、注目している画素の新たな明るさに置き換えるという処理を繰り返すため、多くの処理量が必要とされる。
- 注5 エッジやコーナー:
- 画像中の物体の境界線のように明るさが急に変化する部分で、輪郭のような一本の線(線分)である部分をエッジ、複数のエッジが交差している交点をコーナーと呼ぶ。
- 注6 エッジやコーナーなどの約2,000点の特徴点を毎秒30フレームと高速に抽出:
- コーナー抽出処理時間は5.8マイクロ秒 (領域サイズ:8×8画素、探索範囲:16×16画素の条件での当社実測値)。
- 注7 当社従来機種比5倍以上のパターンマッチング性能:
- 正規化相関マッチング処理時間は10.2マイクロ秒 (テンプレート画像サイズ:8×8画素、探索範囲:32×32画素の条件での当社実測値)。
関連リンク
技術に関するお問い合わせ先
株式会社富士通研究所
ビジネスインキュベーション研究所 自律システム研究部
電話: 046-250-8840 (直通)
E-mail: robotvis@ml.labs.fujitsu.com
プレスリリースに記載された製品の価格、仕様、サービス内容、お問い合わせ先などは、発表日現在のものです。その後予告なしに変更されることがあります。あらかじめご了承ください。
![]()